AMK A4/A5 - Řídící systémy s EtherCAT
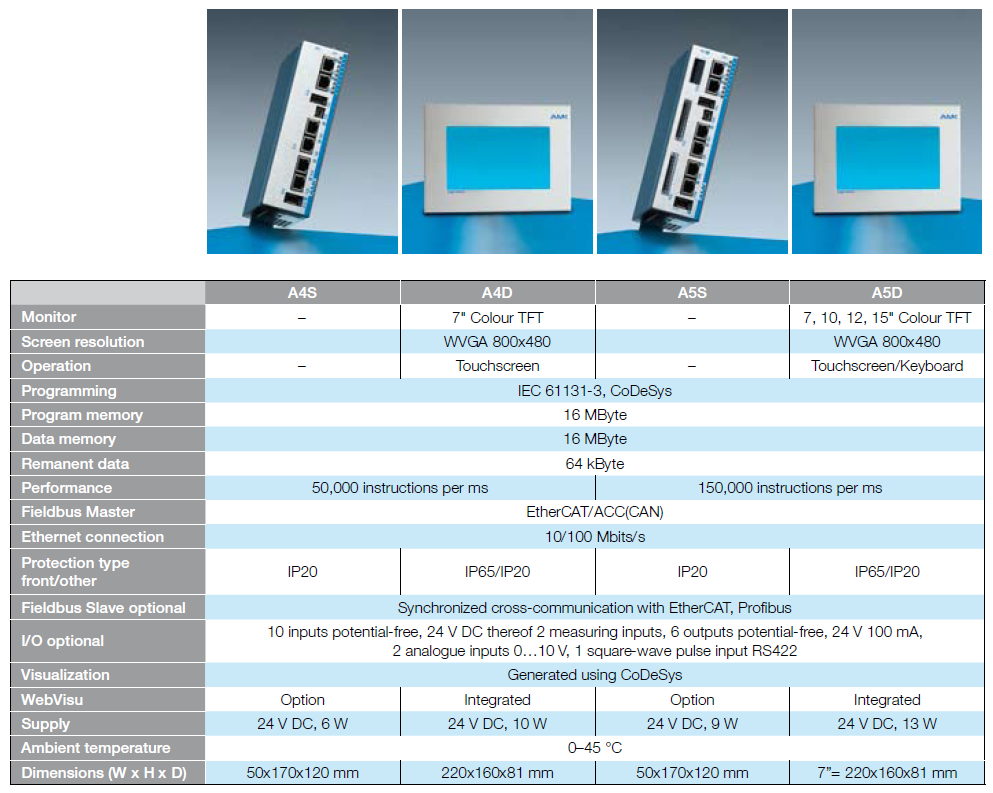
Řada A řídících systémů AMKAMAC je předurčena k řízení jako ústřední řízení stroje nebo součást modulů stroje. Jitter pod 1 µs mezi fieldbusy zajišťuje vysoký stupeň synchronizace mezi snímači a pohony. Toto platí i mezi jednotlivými stupni systémové hierarchie. Řízení běží na real-time Linuxu. Variantně srdce systémů A4 je procesor s ARM architekturou a v případě řady A5 je použit CPU ATOM.
 |
Komunikační topologie
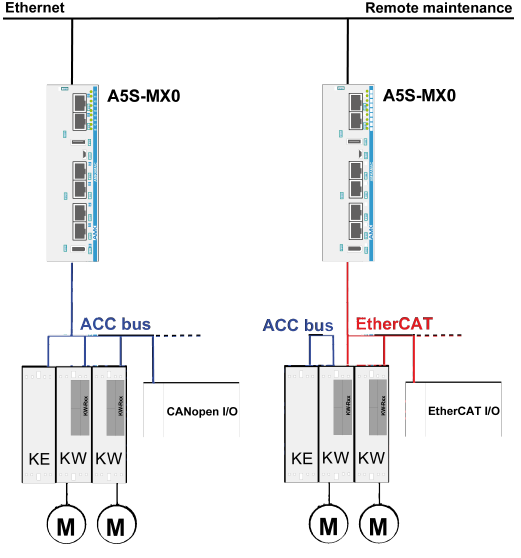 PLC+NC řady A4/A5
|
- You are here:
-
Home

-
News
-
Novinky AMK
- AMK A4/A5 - Řídící systémy s EtherCAT-EN